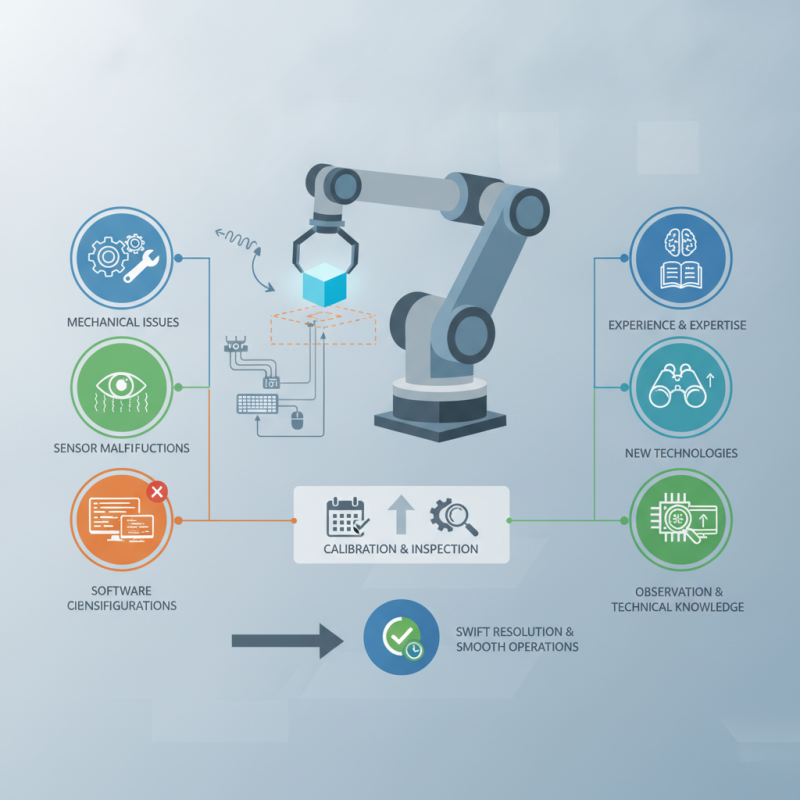
In modern manufacturing and robotics, precision is key. Positioning errors in robotic arms can hinder efficiency and productivity. Understanding how to troubleshoot robotic arm positioning errors is essential for engineers and technicians. Often, these errors stem from mechanical issues, sensor malfunctions, or software misconfigurations. Addressing these points requires a combination of experience and expertise.
Many practitioners face similar challenges when it comes to robotic arms. A small misalignment can lead to significant process delays. Common pitfalls include not calibrating the arm regularly or overlooking wear and tear on components. It’s crucial to assess the situation thoroughly. Evaluate each part and its connection to the whole system.
Moreover, keeping up with new technologies can enhance troubleshooting skills. Robotics is an evolving field, and staying updated on best practices is vital. A mix of careful observation and technical knowledge will ultimately help in swiftly resolving positioning errors. Embracing a proactive approach can make the difference between smooth operations and frustrating delays.
Robotic arms are essential tools in various industries. However, they often encounter positioning errors that can impact productivity. Understanding these common errors is crucial for quick fixes.
One typical error is misalignment. This occurs when the robotic arm does not reach the intended target. Factors like calibration issues and workspace interference can cause this. Regular calibration checks are vital. Ensure the arm operates within its specified range.
Another common issue is overshooting or undershooting. This happens when the arm moves past or falls short of the desired position. It can stem from programming inaccuracies or mechanical wear. Routine maintenance can help mitigate this. Check joints and servos for wear regularly.
Tips: Monitor the robotic arm's performance frequently. Small adjustments can prevent larger issues. Always keep the workspace free from obstructions. This improves accuracy and efficiency. Regular training for operators also enhances handling. Familiarity with the arm’s mechanics leads to quicker troubleshooting. Consider implementing a feedback system. This can help identify errors early, allowing timely corrections.
: Common causes include mechanical misalignment, software glitches, user errors, and environmental factors like temperature changes.
Regular calibration and maintenance checks can help align the joints and reduce positioning errors significantly.
Outdated software may lead to incorrect movements. Frequent updates ensure the algorithms function properly and enhance accuracy.
Proper training is crucial. Inexperienced operators may make mistakes during setup or execution, leading to errors.
Changes in temperature and humidity can alter materials, affecting the arm’s behavior and leading to inaccuracies.
Regular cleaning and inspections prevent dust accumulation and wear, which can cause misalignments and errors during operation.
Analyzing past errors through data logs provides insights that help improve future performance and reduce mistakes.
Regular checks are essential. Misaligned sensors often lead to cumulative errors that can go unnoticed for too long.
Miscommunication can lead to neglect of maintenance protocols. A detailed service log enhances accountability and oversight.
A culture that emphasizes care and responsibility in maintenance practices can lead to improved reliability and performance.
This article provides a comprehensive guide on how to troubleshoot robotic arm positioning errors effectively. It begins by discussing common positioning errors encountered in robotic arms, which are essential for understanding the challenges faced in accurate operations. The article then identifies potential causes of these errors, ranging from mechanical misalignments to software glitches, allowing technicians to pinpoint the source of the problem.
To facilitate quick resolutions, it outlines techniques for rapid diagnosis of positioning issues, emphasizing the importance of systematic checks. Furthermore, the article presents strategies for correcting these errors effectively, ensuring that robotic systems resume optimal performance. Lastly, it highlights the significance of regular maintenance practices to help prevent future occurrences of positioning errors, ensuring enhanced reliability of robotic systems in various applications.
